Painting Robot
Overview
This project is the topic of my Master’s thesis.
In construction spraying operations, spray robots offer significant advantages over manual labor. However, to meet the high precision required, spray robots must accurately perceive large-scale objects. Additionally, the demands of the spraying process require that spray robots incorporate new procedural constraints into their path planning for wall coverage painting. This research mainly addresses the following two issues:
- Full-coverage spray trajectory planning considering robot reachability constraints.
- Easy-to-deploy and verifiable algorithms across systems and platforms. Integrated spraying software combined with specific hardware.
Robot Model

Perception
Initially, we used a region-growing based method for perception, projecting the wall surface onto a 2D plane. This approach effectively transitioned the problem from 3D coverage path planning to 2D coverage path planning.
However, we discovered that this method was inadequate for handling tasks involving corners and curved surfaces. Therefore, we are now exploring a slicing-based method to address these challenges.
Slicing-Based Painting Point Generation
The slicing-based painting point generation method uses a series of parallel planes to slice the area to be painted. This approach is commonly used in workpiece spraying. However, in construction spraying, the robot’s spraying range changes from known mesh files to perceived point cloud files, so the painting point generation method needs to be improved.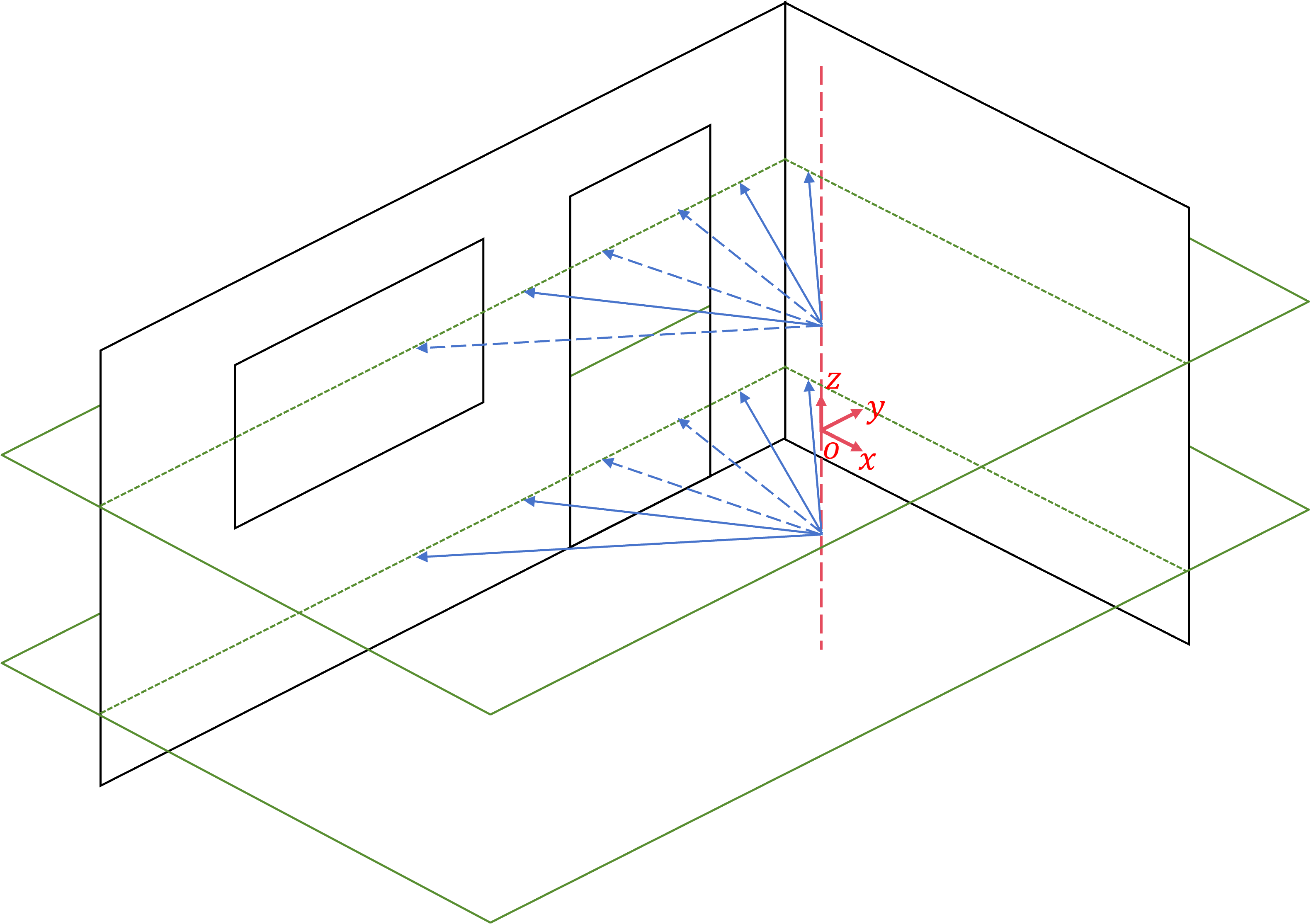
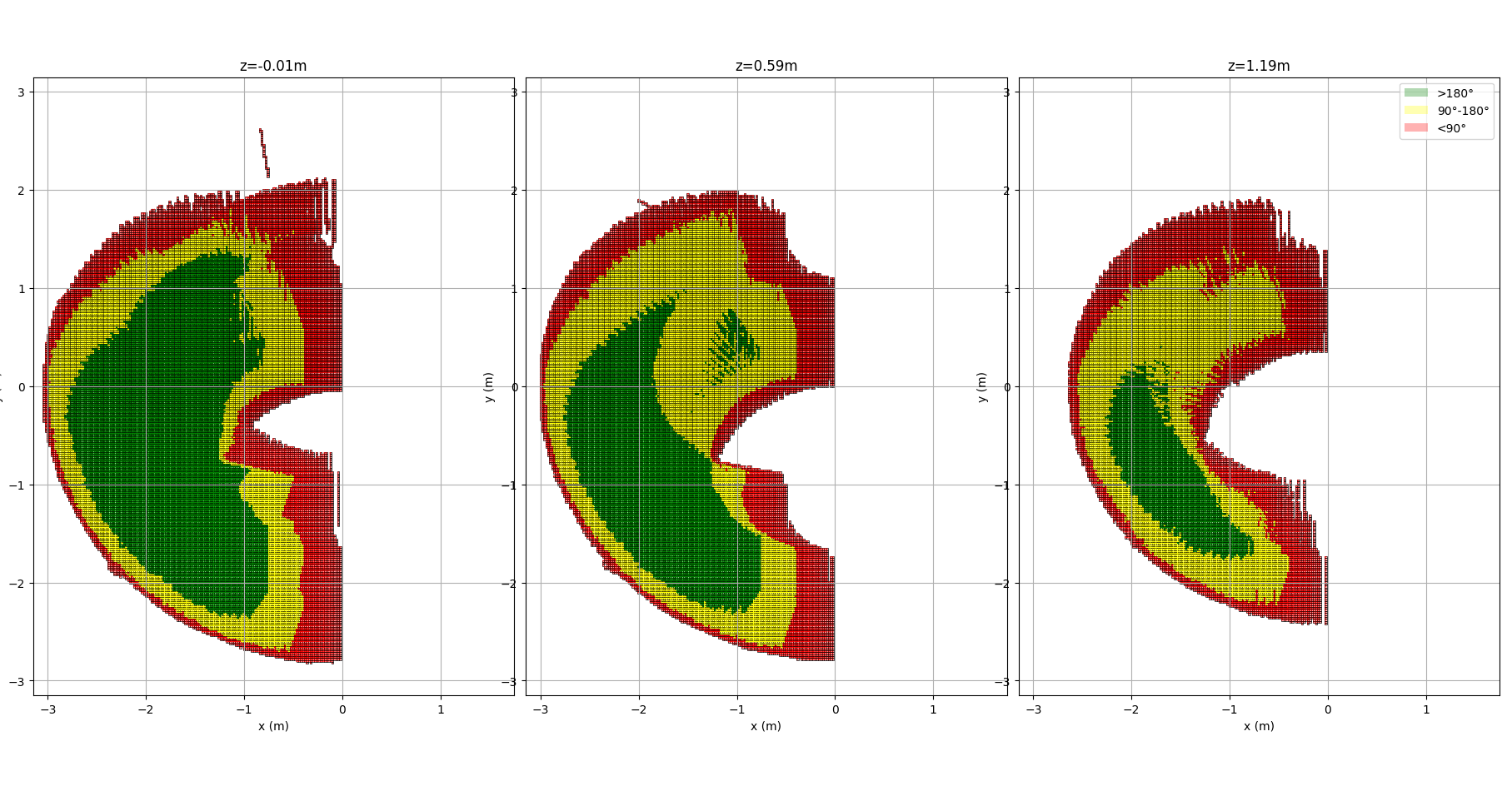
Painting Reachability Map Based Trajectory Optimization
This paper proposes a Compact Reach Map and a Painting Reach Map, and formulates the spray trajectory generation problem as an optimization problem based on these two maps.
Compact Reach Map
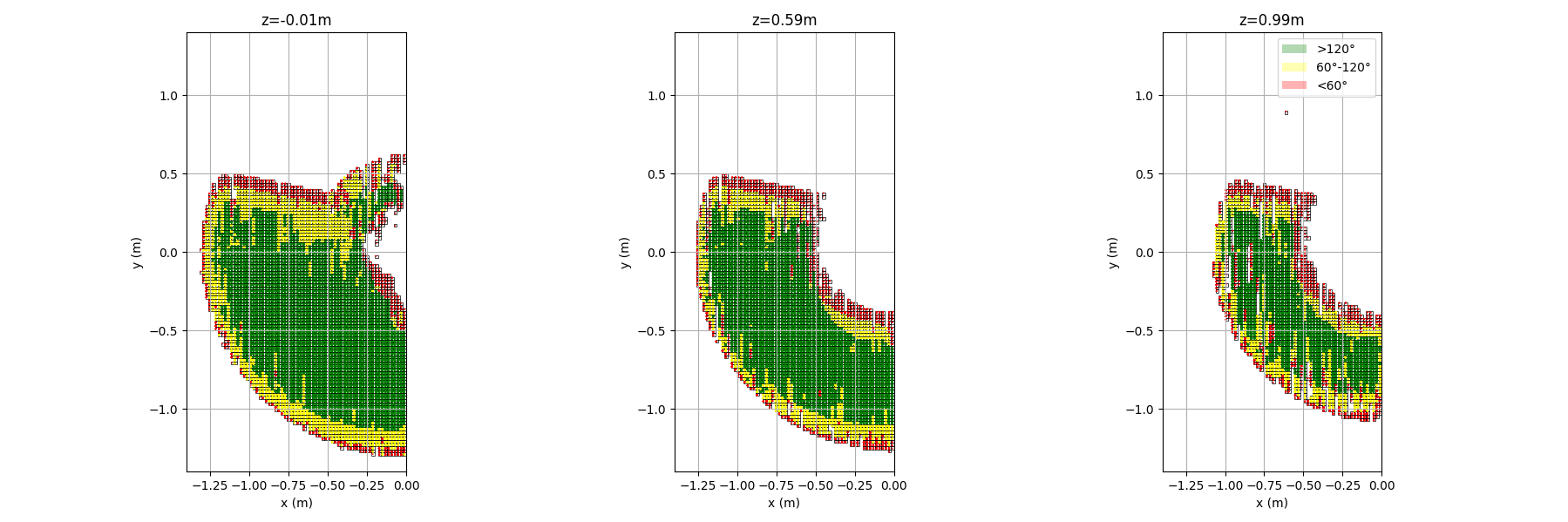
Painting Reach Map
Optimization
Combining the constraints of the Painting Reach Map, the trajectory generation can be formulated as a convex optimization problem for solution.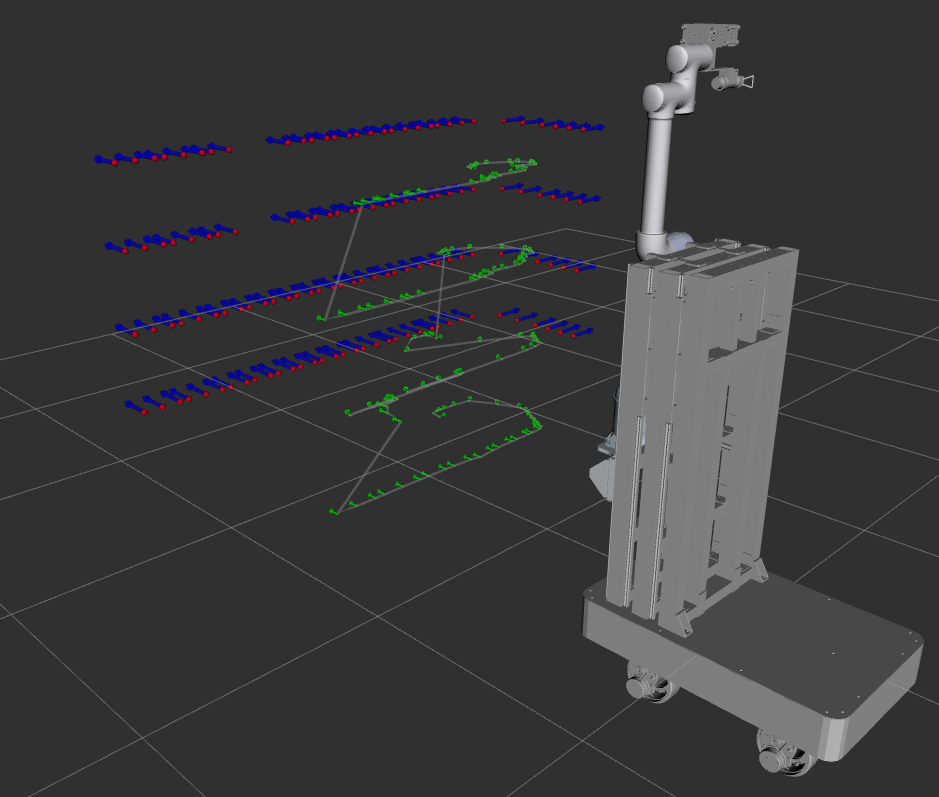
Project Status
This project is still in progress…
Experiments