MOSAIC: Bridging the Sim-to-Real Gap in Generalist Humanoid Motion Tracking and Teleoperation with Rapid Residual Adaptation
Feb 9, 2026·,,,,,,,,,,,·
1 min read
Zhenguo Sun
Bo-Sheng Huang
Yibo Peng
Xukun Li
Jingyu Ma
Yu Sun
Zhe Li
Haojun Jiang
Biao Gao
Zhenshan Bing
Xinlong Wang
Alois Knoll
Abstract
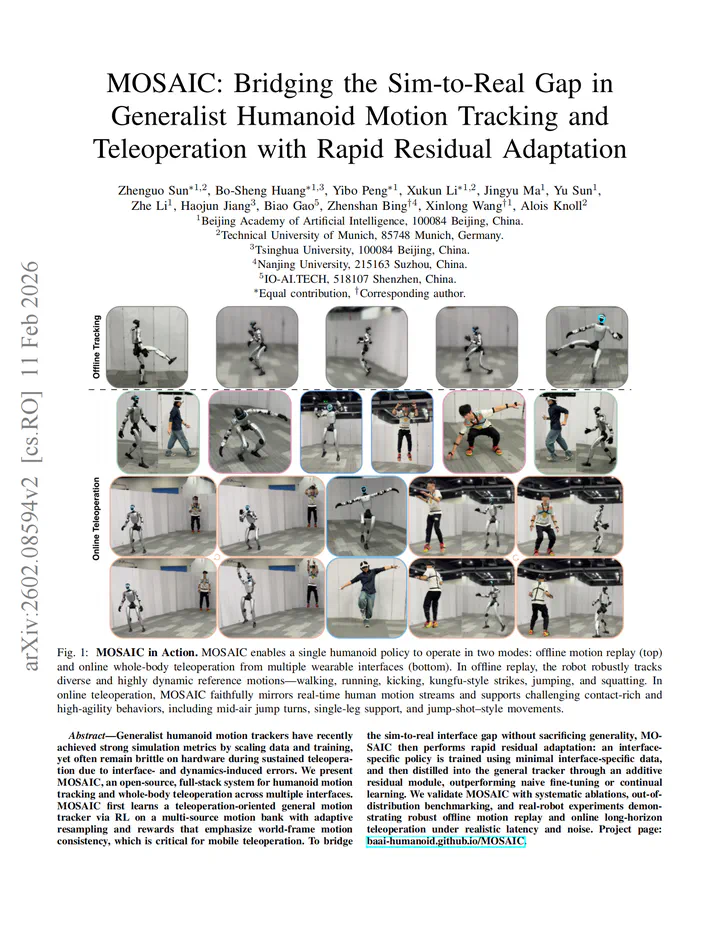
Generalist humanoid motion trackers have recently achieved strong simulation metrics by scaling data and training, yet often remain brittle on hardware during sustained teleoperation due to interface- and dynamics-induced errors. We present MOSAIC, an open-source, full-stack system for humanoid motion tracking and whole-body teleoperation across multiple interfaces. MOSAIC performs rapid residual adaptation to bridge the sim-to-real gap without sacrificing generality.
Type
Publication
arXiv preprint
Released on arXiv:
MOSAIC is an open-source, full-stack system for humanoid motion tracking and teleoperation:
- Learns a general motion tracker via RL on multi-source motion bank
- Performs rapid residual adaptation to bridge sim-to-real gap
- Supports multiple interfaces for teleoperation
- Validated with real-robot experiments demonstrating robust offline motion replay and online long-horizon teleoperation
Authors: Bo-Sheng Huang*, Yibo Peng*, Xukun Li* (Equal contribution). Corresponding authors: Zhenshan Bing†, Xinlong Wang†.