DECO: Decoupled Multimodal Diffusion Transformer for Bimanual Dexterous Manipulation with a Plugin Tactile Adapter
2月 5, 2026·,,,,,,,,,,,,·
1 分钟阅读时长
Xukun Li
Yu Sun
Lei Zhang
Bosheng Huang
Yibo Peng
Yuan Meng
Haojun Jiang
Shaoxuan Xie
Guocai Yao
Alois Knoll
Zhenshan Bing
Xinlong Wang
Zhenguo Sun
摘要
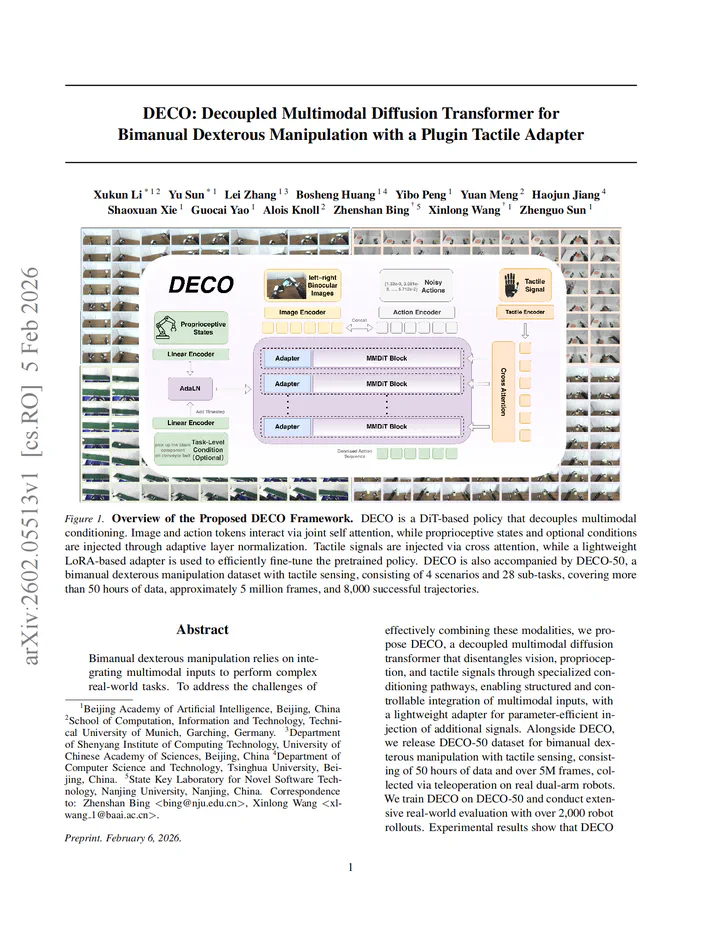
Bimanual dexterous manipulation relies on integrating multimodal inputs to perform complex real-world tasks. We propose DECO, a decoupled multimodal diffusion transformer that disentangles vision, proprioception, and tactile signals through specialized conditioning pathways, with a lightweight adapter for parameter-efficient injection of additional signals. Alongside DECO, we release DECO-50 dataset for bimanual dexterous manipulation with tactile sensing, consisting of 50 hours of data and over 5M frames. Experimental results show that DECO achieves the72.25% average success rate with a 21% improvement over the baseline.
类型
出版物
arXiv preprint
Released on arXiv:
DECO is a decoupled multimodal diffusion transformer for bimanual dexterous manipulation that:
- Disentangles multimodal inputs (vision, proprioception, tactile) through specialized conditioning pathways
- Features a lightweight tactile adapter for parameter-efficient injection of tactile signals
- Achieves 72.25% success rate with 21% improvement over baseline
- Introduces DECO-50 dataset with 50 hours of data and over 5M frames